Flood Mapping
The flood-related algorithms available in WASDI support automated mapping of flood in:
Bare soil (Open area)
Urban area
with:
Sentinel-1, Sentinel-2 or a combination of the 2 missions
VIIRS
Floods in bare soil (open area)
In WASDI there are several applications available to map floods in open areas using either the Sentinel mission or the VIIRS sensor.
When landing in the WASDI marketplace, the used can select the filter “water” to subset only applications related to water in general. Excluding the apps designed to map a snapshot of water at a particular moment and permanent water (“(S1) Snapshot water” and “(S2) Snapshot water”), there remain a rather large number of apps to map floods.
This guideline should help the user select the best app for the specific need.

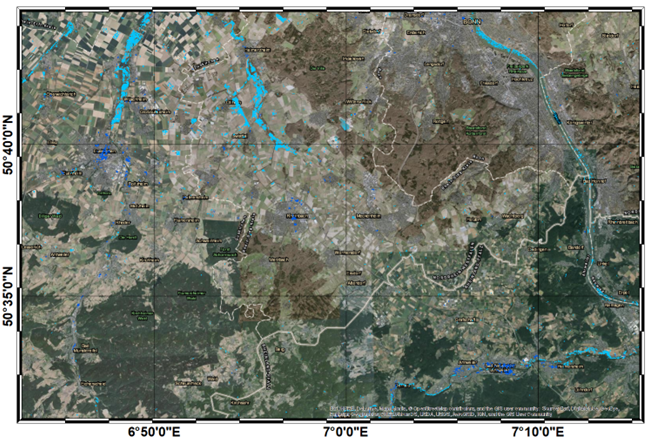
In case of flood map over bare soil, the most general app is Automatic S1-S2 Floods. It generates a fully automatic flood map, over bare soil, from both Sentinel-1 and Sentinel-2 images, as shown in the following image:

In practice, Automatic S1-S2 Floods calls 2 other apps available in WASDI, namely: Automatic AUTOWADE and Automatic HASARD
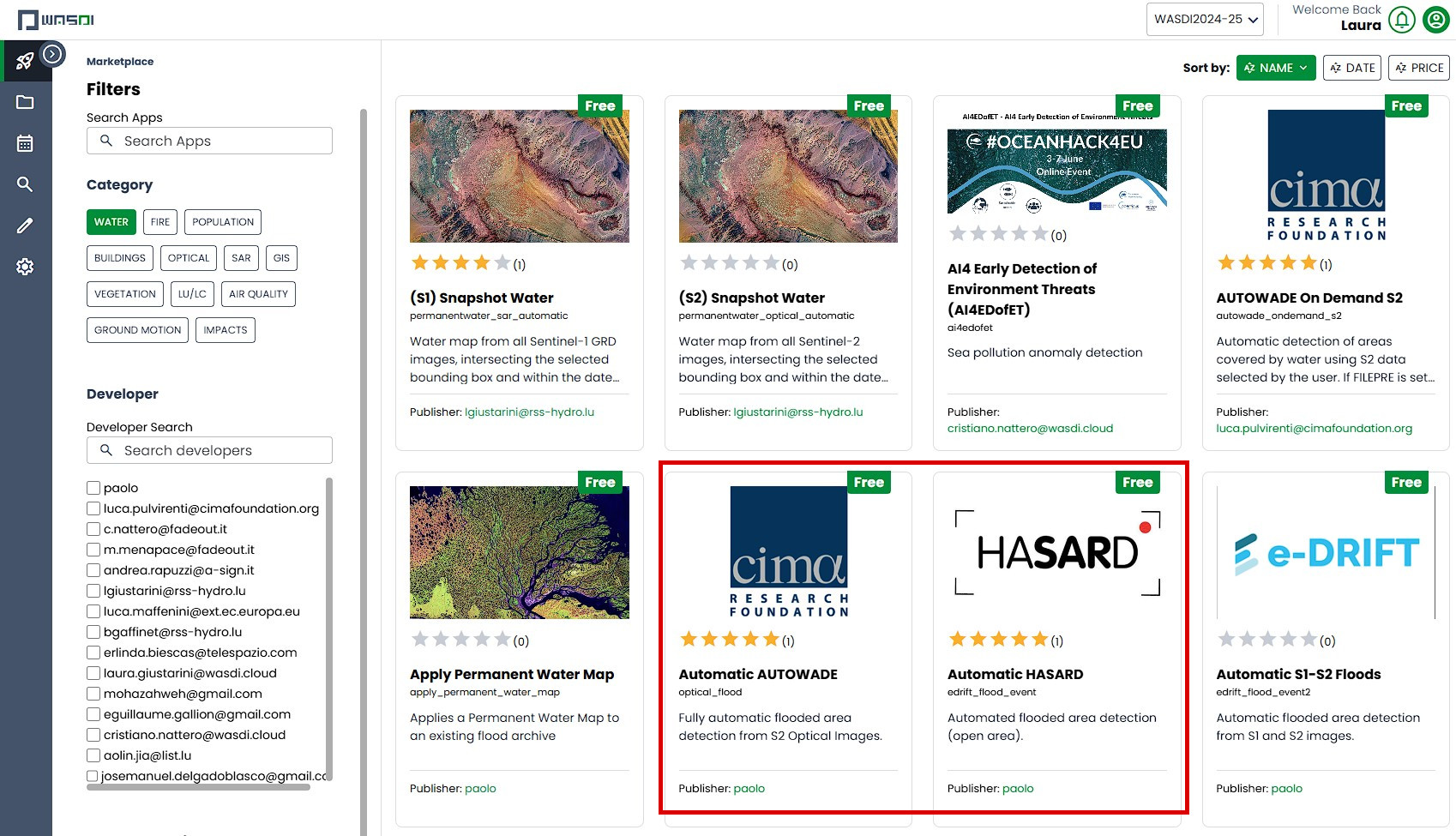
Automatic AUTOWADE performs flood area detection over bare soil from Sentinel-2 optical images, while Automatic HASARD executes flood area detection over bare soil from Sentinel-1 SAR images. Both apps have their corresponding On Demand version. The difference between the automatic version and the On Demand version is:
Automatic: this version automatically identifies the images needed to detect the flood.
On Demand: this version uses Sentinel images selected by the user, according to criteria defined in the help section and such images must imported manually in the workspace where the analysis is run.
We analyze here first the algorithms available to map floods over bare soil with Sentinel-1 and then those to map floods in open areas with Sentinel-2.
Algorithms to map floods in open areas from Sentinel-1
Automatic HASARD
Automatic HASARD can be used to map floods, over bare soil, in a given region and for a certain date.

Automatic HASARD actually calls one more app, namely SAR Archive Generator 3.3.4. The difference between Automatic HASARD and SAR Archive Generator 3.3.4 is that the second one is used to generate daily flood maps in the time range specified by the user. On the other hand, Automatic HASARD calls the Flood Archive Generator to create daily flood map in the time range around the date specified by the user. By default, Automatic HASARD considers 15 days after the date specified by the user and 15 days before the date specified by the user. The reason behind this is that when using Automatic HASARD, the date of the flood might not be entirely clear. In fact, the daily maps will help narrow down the day of the largest extent, supporting also monitoring the evolution of the flood around the date selected by the user. Besides the daily maps of flood, Automatic HASARD will also produce a final composite map that represents the cumulative flood of all the daily flood maps.
SAR Archive Generator 3.3.4
As anticipated above, SAR Archive Generator 3.3.4 is used to generate daily flood maps in the time range specified by the user. It detects floods over bare soil, using Sentinel-1 images. The time range can be as long as the entire archive of Sentinel-1 images.

Flood Frequency Map Generator
The Flood Frequency Map Generator, starting from an archive of flood maps (in .tif format) generated, for example, with the SAR Archive Generator 3.3.4, produces 2 outputs:
a flood count map: a map where each pixel value represents the count of flood events that impacted that pixel
a data count map: a map where each pixel value represents the number of times for which data (images) were present
A frequency map can be then computed dividing the flood count map by the data count map.

HASARD On Demand
HASARD On Demand generates a flooded area map, over bare soil, using 2 Sentinel-1 images, one pre and one post the flood, with the same geometry. Use this app when fairly certain of the date of the flood and when the 2 Sentinel-1 images have already been pre-processed from S1 GRD images and saved as .tif files.

Parameters
HSBA Depth
This is the Hierarchical Split Based Approach (HSBA) Depth parameter as defined in Chini et al. (2017). Its default value of –1 means that the algorithm starts from the entire S1 scene and then, if it did not find any bimodality in the histogram of the entire scene itself, it will split the entire S1 scene into 4 tiles and check each of them for bimodality in the histogram distribution of each of the 4 tiles. In case it finds bimodality in the histogram of one or more of the 4 tiles, it keeps, out of the 4 tiles, those that are bimodal, while it keeps splitting again in 4 tiles the tiles whose histogram is not bimodal. In case this value is changed to, for instance, 2, this means that the algorithm will not check if the entire S1 image has a bimodal histogram. It will also not check if the 4 tiles in which the entire S1 scene can be split are bimodal. It will go straight to check if the 16 tiles in which the entire S1 image can be split are bimodal. This shortens the processing time and should be used only when the user is fairly certain that the flood represents only a small portion of the entire S1 scene.
Ashman Coefficient (no units)
The default value of 2.4 is general, while a higher value (e.g. 2.7) can be selected to better separate the 2 distributions
Minimum value (pixels) for bimodal identification
This parameter represents the minimum number (in pixels) that a sub-tile should have to stop further splitting. A smaller value, like 1,000 pixels, is suggested for small floods, like those that typically happen in Europe, while a larger flood, like 10,000 pixels, is more appropriate for vast events that can be observed in Asia or in North America.
Minimum blob size (pixels)
This parameter is used in post-processing to remove small clusters of pixels that were identified as flood but that most likely are going to be noise and/or misclassification. A smaller value, like 10 pixels, is suggested for small floods, like those that typically happen in Europe, while a larger flood, like 150 pixels, is more appropriate for vast events that can be observed in Asia or in North America.
REFERENCES
Chini, R. Hostache, L. Giustarini and P. Matgen, “A Hierarchical Split-Based Approach for Parametric Thresholding of SAR Images: Flood Inundation as a Test Case,” in IEEE Transactions on Geoscience and Remote Sensing, vol. 55, no. 12, pp. 6975-6988, Dec. 2017, doi: 10.1109/TGRS.2017.2737664.
Chini Marco, Ramona Pelich, Luca Pulvirenti, Nazzareno Pierdicca, Renaud Hostache, and Patrick Matgen. 2019. “Sentinel-1 InSAR Coherence to Detect Floodwater in Urban Areas: Houston and Hurricane Harvey as A Test Case” Remote Sensing 11, no. 2: 107. https://doi.org/10.3390/rs11020107
Algorithms to map floods over bare soil from Sentinel-2
Automatic AUTOWADE
Automatic AUTOWADE can be used to map floods, over bare soil, in a given region and for a certain date. It will search for Sentinel-2 images pre and post flood, try to detect the flooded areas for each pair of images and then it will mosaic the final result. All the single output maps and the final mosaic will be added to the workspace.

AUTOWADE On Demand S2
AUTOWADE On Demand S2 generates a flooded area map, in open area, using 2 Sentinel-2 images, one pre and one post the flood, belonging to the same Sentinel-2 tile. Use this app when fairly certain of the date of the flood and when the 2 Sentinel-2 images have already been imported into the workspace. It can also work with only 1 Sentinel-2 image, which needs to be the one post the flood.

REFERENCES
Pulvirenti, Luca, Giuseppe Squicciarino, and Elisabetta Fiori. 2020. “A Method to Automatically Detect Changes in Multitemporal Spectral Indices: Application to Natural Disaster Damage Assessment” Remote Sensing 12, no. 17: 2681. https://doi.org/10.3390/rs12172681
Algorithms to map floods in open areas from VIIRS
VIIRS Flood
VIIRS Flood produces VIIRS flood map for a specific event and a given areas: it searches the nearest VIIRS images with respect to the date of the event date and it makes a mosaic in the area of interest. If more than one image is available, the closest to the event date is taken in order of priority. The ones of the following days are used to try and fill the cloud gaps. The user can control the number of such days.

Algorithms to map floods in urban areas from Sentinel-1
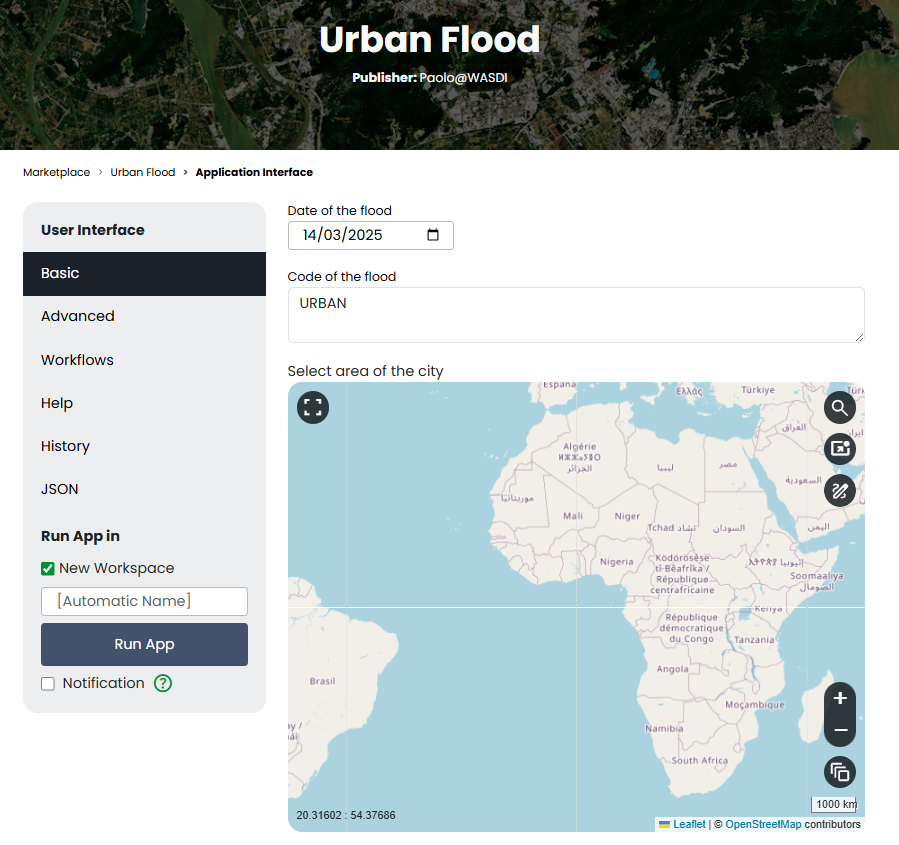
Urban Flood
Urban Flood can be used to map floods in urban on a specific date. It is based on a multi-pass approach exploiting a stack of interferometric acquisitions. The coherence map between each consecutive pair of images is extracted using a square moving window. Given t0, i.e., the date of the image acquired during the flood event, we denote with ρco the coherence of the image pair acquired on t0 and t−1, and ρpre the one with images acquired on t−1 and t−2.
Step (1) allows the double-bounce map to be extracted, i.e., the building footprints.
Step (2) combines the double-bounce map and the change of ρpre–ρco. The underlying assumption is that urban areas affected by a flood have ρco < ρpre.